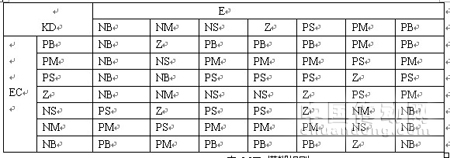
Stepper Motor Fuzzy PID Control Sun Pan Jun Yan Xue Wen (School of Electronic InformaTIon Engineering Tai Yuan University of Science And Technology) 1 Introduction The stepper motor is essentially a digital discrete motor, which directly accepts digital quantities and converts electrical pulse signals into displacement signals. That is, the stepper motor rotates by an angle when a pulse signal is given. The control variables inside the stepper motor are highly non-linear and coupled with each other. The traditional PID control is based on an accurate mathematical model and cannot effectively deal with the uncertain information of the system. It is impossible to achieve good control results with constant PID parameters . Fuzzy control does not require an accurate mathematical model of the object, is insensitive to system changes, has good robustness and strong anti-interference. However, due to its ambiguity, the steady-state accuracy is not good. For this situation, fuzzy control and PID control can be combined. 2 Mathematical model of hybrid stepper motor This paper uses a two-phase stepper motor. In the case of neglecting the effects of mutual inductance, magnetic flux leakage, hysteresis, eddy current, saturation, etc., we use an equivalent RL circuit winding that can be used for one phase analysis. 3 Stepper motor fuzzy PID design In industrial control, PID control is the most widely used analog control method, and its sampling is discretized with a computer to achieve a digital PID formula Table 1 KP fuzzy rules Table 2 KI fuzzy rules Table 3 KD fuzzy rules fuzzy inference and deblurring are also very important. Deblurring is based on the results of fuzzy inference to draw the process of control. Commonly used methods are the maximum membership method, the median method, and the weighted average method. The maximum membership has a trapezoid shape. Disruption is not conducive to the stability of the system, and the weighted average method is beneficial to the stability of the system, so this article uses weighted reasoning ... Figure 2 SIMULINK simulation model of stepper motor fuzzy PID control The fuzzy controller has good dynamic characteristics, but the static characteristics cannot be satisfied, and the PID control has high steady-state static accuracy. PID control is introduced into the fuzzy controller, and fuzzy control is adopted within a large range of error, and PID control is replaced in a small range of error. The conversion of the two is automatically realized according to the error range by the preset program control. 4 Analysis of simulation results In the case where the input at the given position is also 10rad, Figure 4 finally meets the requirements, but there is a large jitter in the middle, and after using fuzzy PID control, it can be seen from Figure 5 that the system responds more quickly and exceeds The amount of adjustment is very small, and the stability of the process is greatly improved. It shows that the use of fuzzy PID control has met the basic requirements of the control system, and it is indeed superior to the simple PID control. 5 Conclusion The stepper motor is modeled as a complex and highly nonlinear system, and the fuzzy PID control system in this paper is greatly improved than the ordinary PID control, but due to the maximum starting speed of the stepper motor Existence leads to easy loss of steps and vibration. In order to maintain the stability and start and stop time as much as possible, fuzzy self-tuning technology can be used. By changing the value of KP, the stepper motor direct start speed and stall speed can be set to a Less than the value, so that the response speed of the system can be further improved. Author brief introduction Sun Panjun (1984-) male Han nationality Henan Shangqiu Taiyuan University of Science and Technology 07 graduate student control theory control engineering Yan Xuewen (1959-) male Han nationality Shanxi Jinzhong Taiyuan University of Science and Technology Engineering professor master control control theory control engineering
The China Pinke Sport Bluetooth Earphone is wear comfortable, sweat-proof headphones. True wireless design is more convenient in running, gym, walking.... Also long work time, even with portable charging case, give you longer music experience.
Pink Sport Bluetooth Earphone,Bluetooth Headphones,Running Earphones,Bluetooth In Ear Headphones ShenDaDian(China) Digital Electronics Co.,Ltd , http://www.btearbuds.com
Keywords: stepper motor fuzzy control PID parameter self-tuning mathematical model simulation
Abstract Stepper motor is a digital discrete motor, that is especial suitable for digital discrete control. But its mathema TIcal model is highly nonlinear, PID control is difficult to achieve high precision performance, the paper combines the fuzzy control with PID control. According to set good error range, the system can achieve automaTIc switching.
Key words stepper motor PID Fuzzy control Parameter Self-tuning MathemaTIcal Model Simulation
Choose 4-step stepping mode, set the phase A as the reference, then phase B lags phase A by 90 electrical angles, then the following current equation: 
According to the laws of mechanics, the mechanical motion equation of the motor can be written: ![]()
Among them, the motor torque, is the load torque, is the moment of inertia, is the viscous friction coefficient, is the rotor angular velocity, assuming that the load torque is zero, there are the following differential equations: ![]()
Equations (1), (2), (3), and (4) form the mathematical model of the two-phase stepper motor, from which you can see that the stepper motor is a highly nonlinear controlled object, which requires a control method It is very complicated, and fuzzy control is just suitable for this feature. 
In this paper, a two-dimensional fuzzy control system is adopted. The fuzzy inference input fuzzy linguistic variables are deviation E and deviation change rate EC. The fuzzy domain is [-3 3], and the output is three changes of PID. The linguistic values ​​of EC and output fuzzy linguistic variables are all selected as 7, namely {negative large (NB), negative medium (NM), negative small (NS), zero (Z), positive small (PS), positive ( PM), Chia Tai (PB)}.
By setting the control amount deviation and deviation change rate, and the basic domain of [, 0.5, 0.5], the quantization factor and fuzzy factor can be determined 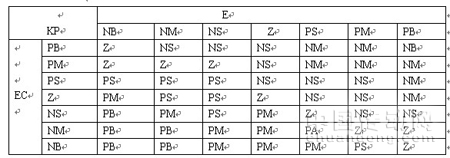



references
1 Shi Jingzhuo. Stepper motor servo control technology [M] Beijing: Science Press, 2006.
2 Li Qingchun A PID fuzzy controller (fuzzy PI + fuzzy ID type) control and decision-making July 2009 volume 24 No. 7
3 Liu Weiguo, Song Shoujun Modeling of Three-phase Reactive Stepping Motor and Simulation of Common Control Methods Micromotor 2007 Vol.40 No.8 (Total No.164)
4 Xie Shihong MATLAB R2008 control system dynamic simulation example tutorial (MATLAB application series) Chemical Industry Press January 2009
5 Wang Xiaoming Motor's single-chip microcomputer control Beijing University of Aeronautics and Astronautics Press June 2008
6 Wang Zongpei stepper motor and its control system [M]. Harbin: Harbin Institute of Technology Press, 1984
Abstract Stepper motors are digital discrete motors, especially suitable for digital discrete control. However, its mathematical model is highly nonlinear, and it is difficult for PID control to achieve high accuracy performance. In this paper, fuzzy control and PID control are combined, and automatic switching is realized according to the set error range.