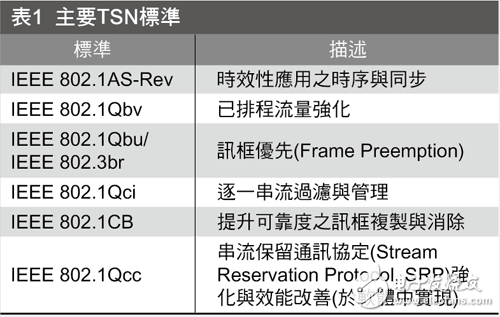
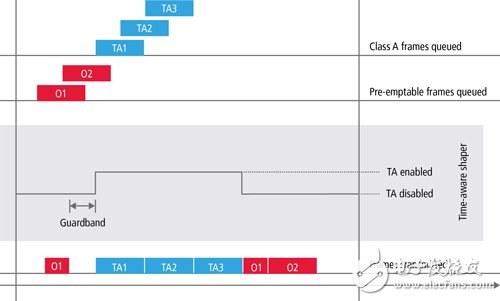
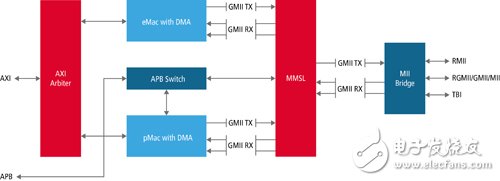
Ethernet technology has the characteristics of low cost, light weight, high data transmission rate, and is not proprietary, so it is the key to implementing advanced driver assistance system (ADAS) applications and autonomous driving. To achieve the safety and precision latency requirements required to operate a vehicle, the industry is developing a variety of open formats that help improve the reliability, timing, redundancy, and fault detection capabilities of Ethernet-based applications. Standards to facilitate the application of this technology to all functions of the car. The goal of the automotive industry and Ethernet network is to use its advanced network architecture to run increasingly sophisticated applications, from infotainment to advanced driver assistance systems to mission-critical systems. Currently, Ethernet is used for on-board diagnostics (On-board Diagnos TIcs, OBD), firmware updates, and shooting images for panoramic cameras. The next stage is to connect the sensor to the embedded central processing unit (CPU) using an Ethernet network to implement advanced driver assistance system applications such as active cruise control, lane maintenance assistance, traffic sign recognition, pedestrian detection, and collision avoidance. The required sensor fusion. In the future, Ethernet will be used for direct control of the powertrain and chassis, providing mission-critical functions such as brakes, steering, shifting, and engine control, all of which will bring together all the functions needed for autonomous driving. Improve communication protocol requirements to improve reliability and reduce latency Increased functionality means that connectivity between in-vehicle components needs to be enhanced, especially in terms of bandwidth, security and reliability, and latency. As processors, cameras, and the number of sensing components such as radar continue to increase, not only is the required bandwidth greater, but more reliable transmission of time-sensitive data. The reliability of the transmission depends on precise and short-term delays, especially in mission-critical control. For example, if a packet loss occurs in an application such as collision avoidance, it may not be able to brake in time, causing an irreparable disaster. Similarly, if the system bandwidth is difficult to accommodate data aggregation from multiple cameras and sensors, it is impossible to achieve automatic driving. From the Ethernet point of view, bandwidth is mainly applied to the physical layer (PHY Layer), while reliability and delay are mainly applied to the Media Access Control (MAC) layer. TSN standards speed up development to meet safety/low latency requirements The open standards currently under development are designed to meet the requirements of future advanced driver assistance system functions and safety systems in terms of safety, reliability and delay, ensuring reliable and timely interoperability of all automotive components. In order to achieve the security and low latency requirements for maneuvering vehicles, IEEE 802.1, the statutory standard for Ethernet switching and data transmission control, is developing a new open standard, collectively known as Time-Dependent Network (TIME SensiTIve Networking, TSN). (Table 1) to achieve low latency, accurate and reliable synchronous packet transmission. Table 1 Main TSN standards TSN is a superset of the AVB standard, which shows how to guarantee bandwidth and perform data synchronization on the Ethernet network to ensure quality of service (QoS) with a specification accuracy of less than one microsecond (μs). And the required implementation is better than the requirements of many mission-critical functions. The main types of TSN standards are described below: IEEE 802.1AS-Rev: Timing and synchronization of time-sensitive applications The IEEE 802.1AS-Rev standard introduces redundancy in master clock and fault detection to improve the reliability of real-time clock settings in electronic control units (ECUs) and meet ISO 26262 functional safety requirements. IEEE 802.1Qbv: Scheduled Traffic Enhancement The IEEE 802.1Qbv standard adds time-aware queue exhaust procedures based on timings taken from the IEEE 802.1AS standard, while supporting scheduled traffic, Credit-based scheduled traffic, and other Bridged Traffic. This standard adds the transmission gate to eight priority queues, which can be used to close the low priority queue at a specific point in time to facilitate the high priority queue to use the network immediately, thereby ensuring access to the high priority low latency control frame, similar to automatic The Time Triggered Ethernet network referred to by the Society of Vehicle Engineers (SAE) in 2011-AS6802 enables periodic audiovisual (AV) traffic such as IEEE 1722 A-stream streaming that transmits a frame every 125 microseconds. The IEEE 802.1Qbv introduces the concept of a guard band, which is to prevent traffic from starting to transmit during a certain period of time to ensure that the control frame can be sent at scheduled times. To support scheduled traffic, time-aware shaping must be used to reduce communication delays and jitter. The method is to insert time-aware high-priority A-level data TA1-TA3 between two O1 frame segments, thereby shortening the delay. The transmission of non-aging data is blocked during the guard band period to prevent new time-aware (high priority) data packets from being delayed by other data O. The transmitted data has both priority and certainty and is the key to the control system. IEEE 802.1Qbu/IEEE 802.3br: Consider frame priority The priority defined by IEEE 802.1Qbu and IEEE 802.3br avoids excessive protection bands and can be segmented after the frame begins transmission. In other words, the high priority frame interrupts the transmission of the low priority frame. The IEEE 802.3br standard defines the necessary frame fragment data encapsulation and debug monitoring values, with a minimum of 64 bytes. The priority and control of the send queue is related to the traffic transmitted on the output port. Figure 2 illustrates the IEEE 802.1Qbu/IEEE 802.3 br-frame priority (Frame PreempTIon) implementation for TA1, TA2, and TA3. Figure 2 Sample of the timing chart IEEE 802.1Qci: Stream-by-stream filtering and management The IEEE 802.1Qci standard for input traffic is still in its early stages, with the goal of mitigating the effects of erroneous operating nodes, defining management and filtering functions, including detecting and mitigating destructive transmissions caused by other systems in the network. The robustness of the network. IEEE 802.1CB: Frame replication and elimination for improved reliability The IEEE 802.1CB standard, also in its early stages, introduces seamless backup and fault detection to improve performance and frame duplication and elimination. For example, network nodes can be ring-connected to perform bi-directional traffic transmission, thus requiring two different paths to the destination. The IEEE 802.1CB standard eliminates duplicate frames in the receiving node specification. To ensure functional safety, high availability, redundant fault-tolerant design, and fast fault detection are required. A ring topology is a way to introduce redundancy into a network. The IEEE 802.1CB and IEEE 802.1AS-Rev standards introduce fault detection methods. MAC merge sublayer module supports multiple TSN standards Over the years, many manufacturers have been committed to providing AVB standards and TSN standard Ethernet MAC products based on automotive applications. Among them, the Cadence Ethernet MAC not only supports the transmission queue, but also recently updated the support for the IEEE 802.1AS-Rev and IEEE 802.1Qbv standards, using the open timer and the gatekeeper timer in each transmission queue. The company has now implemented the MAC Merge Layer (MMSL) module with two Ethernet MAC choices, one with priority MAC (pMAC) and the other with fast MAC (eMAC) (Figure 3). eMAC is only used to support a single delivery queue. When priority is disabled, MMSL will perform frame-by-box mediation between eMAC and pMAC. The eMAC is still the highest priority, but the frame sent from the pMAC will be sent out in the original state without modification. Figure 3 MAC merge sublayer In addition, the company also offers solutions that support IEEE 802.1Qbu prioritized hardware requirements. After the definitions of the IEEE 802.1CB and IEEE 802.1Qci standards are more explicit, corresponding support will also be provided. Efficient TSN standard reliability and accelerated deployment of automotive Ethernet networks Features such as the new TSN standard, such as the new generation of AVB transmission protocols, fully meet the requirements of ISO 26262 and extend the deployment of automotive Ethernet networks to safety-critical systems. The TSN standard is designed to improve the robustness, reliability, redundancy, and fault detection capabilities of Ethernet networks for the use of Ethernet in real-time control and security-critical applications. The authors are all at Cadence, Sachin Dhingra is a senior product marketing manager.
The utility model relates to a medical atomization treatment and humidifying device belonging to the technical field of medical equipment and household appliances.
Professional Medical Atomization manufacturer is located in China, including Medical Vape,Dose Control Vape Pen,Supersonic Wave Vape, etc. Medical Atomization,Medical Vape,Dose Control Vape Pen,Supersonic Wave Vape Shenzhen MASON VAP Technology Co., Ltd. , https://www.disposablevapepenfactory.com