I-type Inductance Core,I Inductor Model,Ring I-type Inductance,Design Of I-Shaped Inductor Xuzhou Jiuli Electronics Co., Ltd , https://www.xzjlelectronic.com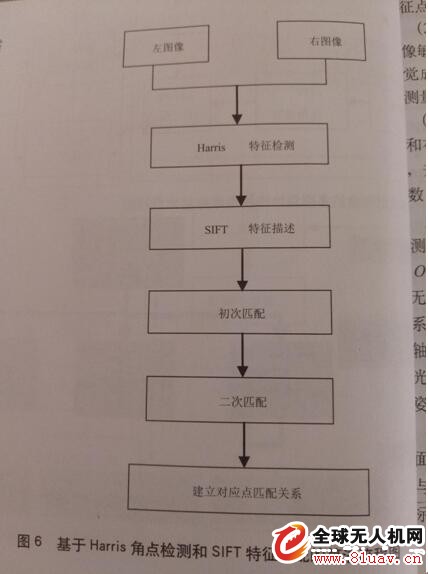
Real-time relative pose calculation (omitted)
Feature extraction in stereo vision algorithm is a very important process, mainly to obtain the feature points needed for later matching. The result directly determines the points and regions participating in the matching in the image. At present, various stereo matching algorithms have been proposed at home and abroad. Different stereo matching algorithms are often targeted at matching different types of images and different application requirements. Calculating the relative position and attitude information of the UAV and the motion platform requires three-dimensional information activation of at least four feature points on the target UAV. Based on this, a widely used algorithm based on Harris corner detection and SI FT feature matching is widely used. Perform feature extraction and matching of the target drone.
In the target feature matching stage, the current frame target pose is top-measured according to the previous frame target pose, thereby determining a set of features to be matched. Then, according to the known drone model, the Region Of Interest (ROI) including the candidate features is divided, so that the calculation amount of the subsequent matching is reduced. Then, in each ROI, the features are searched for by appropriate methods and matched to the model. Since multiple features may be found, it is necessary to determine the optimal matching result by nonlinear regression. Figure 6 is a flow chart of feature extraction and matching algorithm based on Harris corner detection and SIFT feature matching.
The left and right images in the figure are the left and right views obtained by scanning the corrected same scene. The algorithm first uses the Harris feature extraction algorithm for feature point extraction on the left image. Then, the SIFT feature descriptor is used to describe the feature points, and the nearest stereo matching is performed by the nearest neighbor matching strategy of Euclidean distance to find the matching point. Then, around the already matched points in the image, the region-based matching is used for the second matching, and the corresponding point matching relationship is established.
Conclusion
This paper theoretically expounds the multi-variable feature stereoscopic pose measurement technology, which satisfies the application requirements of high-precision relative pose information in the process of unmanned helicopter landing without increasing the unmanned helicopter load. The high-precision problem of human helicopter tracking and relative pose information measurement provides a theoretical basis.
The method can not only realize the stable and reliable tracking of the unmanned helicopter motion of the binocular infrared sensor, but also can output the high-precision phase and position attitude parameters and the infrared binocular sensor follow-up information in real time; it has all-weather, high resolution and strong anti-interference ability. The feature solves the problem that the monocular infrared imaging system can not accurately measure the relative height information of the unmanned helicopter and the motion platform in real time without special feature pattern, and realizes the shipless unmounted without specific feature points. The precise position measurement of the helicopter.