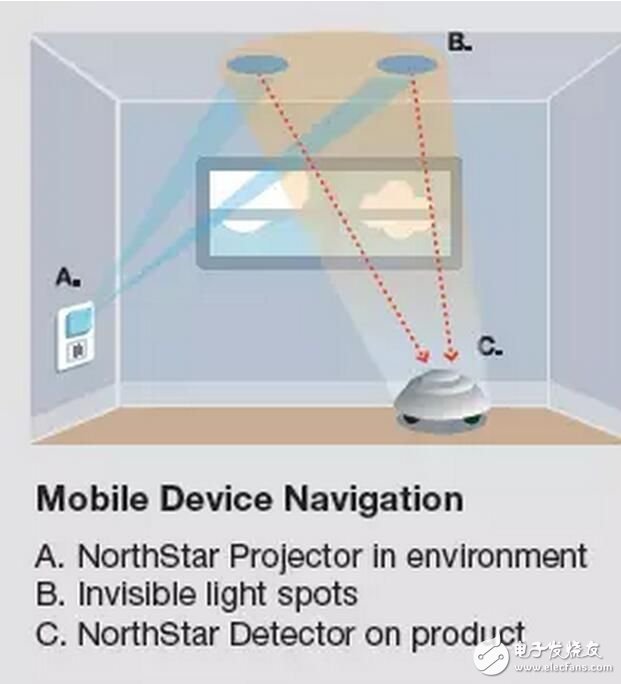
I believe that all the officers in front of the screen should have experienced the sweeping of the floor. Recalling the process of sweeping the floor can be broken down into two main actions: go to a certain position; clean it. Correspondingly, as a substitute for human sweeping labor, the sweeping robot also contains two main systems: autonomous navigation system and cleaning system. If the cleaning system is the capital of the sweeping robot in the name of "sweeping the ground", it is the heart of the sweeping robot; then the autonomous navigation system is the base of the "robot", and it is the brain of the sweeping robot. If there is no autonomous navigation system, then it can only be called a “sweeping machine†instead of a “sweeping robotâ€. Let's take a closer look at how the "bottom gas" of the sweeping robot is produced. | Three classic questions about robot navigation Speaking of robotic autonomous navigation, it can be summarized as three questions raised by MIT professor John J. Leonard and former University of Sydney professor Hugh Durrant-Whyte: (1) Where am I? (2) Where I am going? (3) How should I go there? The first problem is the positioning problem of the robot, that is, how to determine the position of the robot in the current environment based on the information currently observed and previously known. The second and third questions actually specify a goal and then plan a certain path to achieve it. For a typical mobile robot, this goal is a point, point-to-point navigation. For the sweeping robot, the goal is not to reach a certain point, but to traverse a certain area to achieve cleaning of the room. Let us first look at the first question today, the positioning of the sweeping robot. Positioning is the most basic link in the autonomous navigation of mobile robots including sweeping robots, and it is also a problem that must be solved to complete the task. When it comes to positioning, the first thing that people think of is the commonly used outdoor positioning such as GPS positioning and base station positioning. In contrast, the positioning of the sweeping robot is indoor positioning, which requires high positioning accuracy (at least in the sub-meter level), good real-time performance, GPS, base station positioning and other methods can not be satisfied. The positioning of the sweeping robot can be generally divided into relative positioning and absolute positioning. Let us look at it separately. | Relative Positioning The Dead-Reckoning Method is a classic relative positioning method and the most widely used positioning method for sweeping robots. It uses the various sensors equipped by the robot to obtain the motion dynamic information of the robot, and obtains the estimated position of the robot relative to the initial test state by the recursive accumulation formula. The most commonly used sensors for dead reckoning are: code discs, inertial sensors (such as gyroscopes, accelerometers). The code wheel method generally records the number of revolutions of the wheel using an optical code disk mounted on the wheel, thereby obtaining the amount of change of the position and posture of the robot with respect to the previous sampling time, and the position of the robot can be estimated by the accumulation of these displacement amounts. The advantage of the code wheel method is that the method is simple and the price is low, but it is easily affected by factors such as calibration error, wheel slippage, bumps, etc., and the error is large. However, because the code wheel is cheap and easy to use, it can be used for position estimation within a short time distance of the robot. The inertial sensor uses the gyroscope and accelerometer to obtain the angular acceleration and linear acceleration information of the robot, and obtains the position information of the robot through integration. In general, the positioning accuracy of the inertial sensor is higher than that of the code wheel, but its accuracy is also affected by gyroscope drift, calibration error, sensitivity and other issues. Whether using a code wheel or an inertial sensor, they all have one common drawback: there is a cumulative error, and as the travel time and distance increase, the error increases. Therefore, the relative positioning method is not suitable for precise positioning over long periods of time and long distances. Absolute positioning method Absolute positioning method means that the robot calculates its own position by calculating the mutual relationship between itself and the reference information by obtaining some known reference information such as the outside world. . Absolute positioning mainly adopts beacon-based positioning, environment map model matching positioning, and visual positioning. Beacon-based positioning Beacon positioning originally refers to the technology of positioning and navigating using radio waves emitted by radio base stations in navigation or aviation. For the indoor positioning of the robot, the robot receives or observes the beacon of the known position in the environment through various sensors, calculates the relative position of the robot and the beacon, and then substitutes the known beacon position coordinates to solve the robot's position. Absolute coordinates to achieve positioning. The beacon used for positioning needs to meet three conditions: (1) The position of the beacon is fixed and the absolute coordinates of the beacon are known; (2) Beacons have active and passive features and are easy to identify; (3) The beacon position is convenient for observation from all directions. Beacon positioning methods mainly include trilateration and triangulation. Trilateral measurement is a method of determining the position of a mobile robot based on the distance between the measured robot and the beacon. The trilateration positioning system requires at least three transmitters (or receivers) of known positions, and the receiver (or transmitter) is mounted on the mobile robot. The idea of ​​triangulation and trilateration is generally the same, and the positioning is performed by measuring the angle between the mobile robot and the beacon. Beacon-based positioning systems rely on beacons of known features in a range of environments and require sensors to be mounted on the mobile robot to observe beacons. There are many types of sensors for beacon observation, such as ultrasonic sensors, laser radars, and visual sensors. It can be measured in real time, without progressive error, relatively high precision and good stability, providing fast, stable and accurate absolute position information, but it costs a lot to install and maintain beacons. There are already more mature beacon-based beacon-based sweeping robots on the market, such as Proscenic's analog GPS satellite three-point positioning technology, iRobot's Northstar navigation and positioning technology, but because of its relatively expensive price, they are used for relatively high-end In the product. Pcb Pluggable Terminal Block Connector ,Pluggable Terminal Block,Contact Pluggable Terminal Blocks ,Pluggable Screw Terminal Cixi Xinke Electronic Technology Co., Ltd. , https://www.cxxinke.com