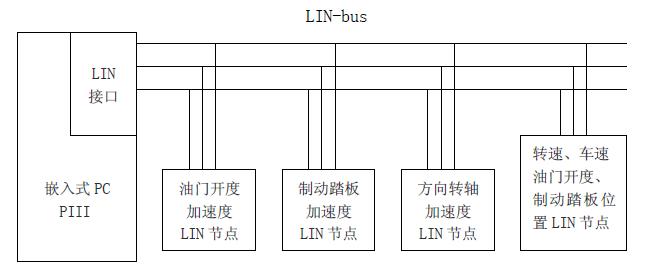
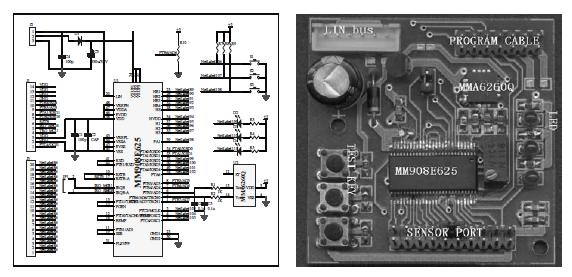
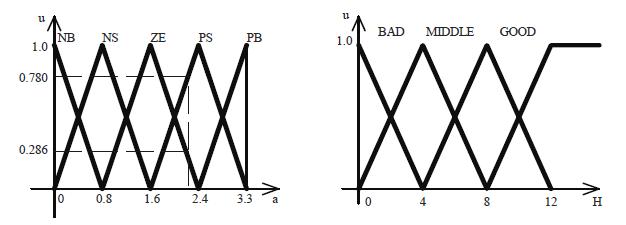
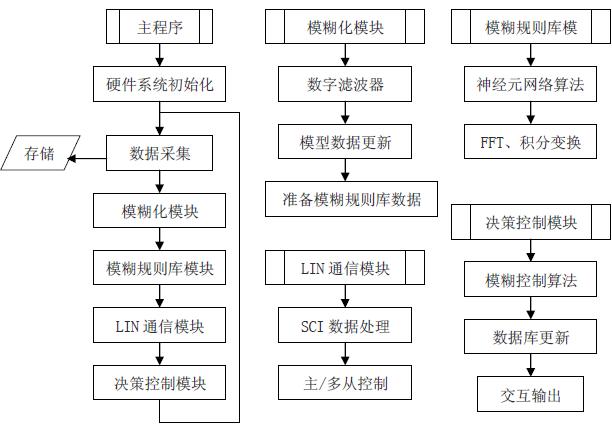
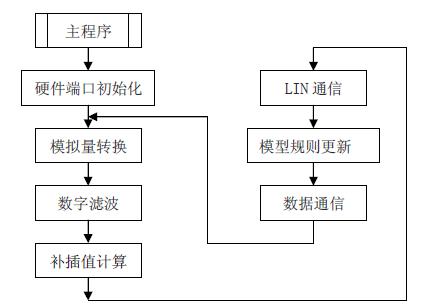
Monitoring of vehicle driving status (fatigue driving) based on MM908E625 and Low-G In China's new "Road Traffic Law", in order to maintain road traffic safety, the driving speed and continuous driving time are also clearly stipulated. Some developed transportation countries abroad have also formulated uniform national regulations in this regard. Fatigue driving is the "invisible killer" of highway car driving, especially on highways. According to relevant statistics, the conclusions drawn from a large number of case studies of traffic accidents are that: road traffic accidents caused by driver fatigue due to fatigue driving account for about traffic accidents. 20% of the total. However, fatigue driving accounts for 22% -30% of the causes of fatal traffic accidents, and ranks first among the causes of fatal traffic accidents. Therefore, it is conceivable that fatigue driving is harmful to road traffic safety. In addition to regulations, automobile manufacturers at home and abroad have also designed various equipment for fatigue driving monitoring. An infrared eye scanner for fatigue driving has been successfully developed in the United States. This eye scanner looks like a small camera. It is also very convenient, as long as it is installed on the instrument panel and the lens is aimed at the driver, the scanner will continuously send an infrared signal to scan the white part of the driver's eyeball, at the same time determine the degree of fatigue and issue "deceleration stop", "rest" "Wait" and other warning signs. Renault, Nissan and other industrial giants have long developed a surveillance system that overcomes fatigue driving, but it cannot be commercialized due to defects in theoretical technology applications. The fatigue warning device developed by Toyota in Japan can detect these reactions as long as the driver is a little sluggish when steering the steering wheel, or the pulse changes a bit abnormally, and issues a warning to vibrate the seat cushion or automatically brake. The fatigue tester developed by the University of Tokyo in Japan can be worn on the driver's wrist. The tester is equipped with a small oxygen battery electrode, which can measure the content of lactic acid, ammonia and alcohol in the driver's sweat, and then transmit the data to the research center through a small radio transmitter. The research center uses computer analysis to determine the fatigue level of the driver and promptly warns the driver to avoid traffic accidents. There are also reports in China that the "car driving recorder" that can effectively prevent drivers from driving illegally and curb major traffic accidents has passed the appraisal. Due to these or other problems, the above methods have certain difficulties in achieving practicality. With the rapid development of electronic technology, Copyright ARCHEAN.net, through the use of the most advanced testing technology, combined with the application of embedded computers, network technology, and intelligent control technology, monitor the fatigue driving state of the car to achieve the reduction caused by fatigue driving The purpose of road traffic accidents. Design overview The goal of this design is to apply the latest developments in modern electronic technology, using the chips and sensors provided by Motorola for the fifth embedded microprocessor "Freescale Cup" to design the driving state of the car based on MM908E625 and Low-G (fatigue driving) Monitor. Monitor features: 1. Multi-point monitoring of the steering shaft, accelerator pedal and brake pedal of the steering wheel. 2. The acceleration sensor signals are processed independently to ensure real-time performance. 3. LIN bus network, to achieve distributed electronic system control in the car. 4. Interactive platform: The choice of driving road conditions is more conducive to the monitoring of the control system. Provide sound and light, vibration alarm tips. 5. Large-capacity data storage and collection, large-screen LCD display, and data query during dynamic driving time. 6. Neural network technology, fuzzy control and expert system. The basic idea of ​​the car driving state (fatigue driving) monitor is that when the driver is driving normally, driving for a short distance, and driving for a short time, there is no fatigue driving problem. At this time, the monitor's job is to collect data on the driving habits of the driver Establish a mathematical model of driving habits and make corrections based on continuously collected data. As the continuous driving time increases, the monitor automatically enters the fatigue driving monitoring state. If the driver has fatigue symptoms, it will inevitably reflect the deviation from the normal driving. Such as: the frequency of sudden sudden braking increases, the steering wheel suddenly turns during continuous large throttle, the stability of the accelerator pedal changes, etc. Combined with neural network technology, fuzzy control and expert system, it forms a monitoring of the driving status of the driver, adds an interactive platform with the driver, and presents driving instructions and alarms to the driver. I have made some attempts on my own automatic car and achieved results. The acceleration sensor Low-G is installed on the steering shaft, accelerator pedal and brake pedal of the steering wheel respectively. The MCU / DSP embedded microprocessor MM908E625 processes the sensor signals and forms a LIN bus network. In addition to the acceleration sensor Low-G, the sensor also needs a speed and position sensor. Hardware description 1. Hardware system composition: The main node of the system is an embedded PC, which is equipped with a PIII processor and a touch screen to provide an interactive interface. The main node PC completes the establishment and update of the database, intelligent control program operation and communication management of LIN sub-nodes. The interactive interface provides options such as road segments, road conditions, measurement and control time, level prompts and alarms for driving status, etc. The main node is connected to the four LIN sub-nodes through the LIN interface board. The LIN sub-node uses the MM908E625 as the core to detect and preprocess signals such as acceleration, engine speed, vehicle speed, throttle opening and brake pedal position. The first, second, and third child nodes independently process the low-G signals of the steering wheel's steering shaft, accelerator pedal, and brake pedal acceleration sensors. The fourth LIN sub-node adopts Hall pulse sensors for engine speed, vehicle speed, throttle opening and brake pedal position, engine speed, vehicle speed uses Hall pulse sensor, and throttle linear opening and brake pedal position uses Hall sensor. The experiment shows that the acceleration signal can better reflect the difference in the control effect of the three key components of the steering wheel, accelerator pedal and brake pedal of the vehicle's steering wheel during normal driving and fatigue driving. The output of the acceleration signal during normal driving The voltage changes at the center point voltage ± 0.5V, and the output voltage of the acceleration signal during fatigue driving changes at the center point voltage ± 1V, and the frequency of the acceleration signal change is greater than that in normal driving. The measurement signal of the fourth LIN subnode serves as the input limiting condition of the fuzzy controller. The block diagram of the hardware system structure is shown in Figure (1): Figure (1) Block diagram of the hardware system structure 2. LIN subnode of accelerometer: (1). LIN sub-node schematic diagram of speedometer (2) and acceleration measurement module diagram (3): Figure (2) Schematic diagram of LIN subnode (3) Measurement module (2). Design and structure installation of LIN sub-node of accelerometer: MMA6260Q is an XY biaxial sensor. In order to ensure ideal acceleration measurement, the accelerometer is designed as a measurement module with LIN interface and physical size of 5X5X2CM, which is directly installed on the accelerator pedal, brake pedal and direction shaft. The accelerator pedal and brake pedal measurement modules are installed vertically to ensure that the acceleration signal of the pedal can be measured in the X-axis direction and the average vibration signal during vehicle operation in the Y-axis direction. The direction rotation axis measurement module is installed horizontally to ensure that the acceleration signal of the steering wheel steering can be measured in the XY axis direction. 3. Sensor introduction: In addition to Low-G for acceleration measurement, there are the following sensors. Throttle (throttle) opening sensor: The throttle is operated by the driver and directly reflects the driver's control intention, so it is an important signal to judge the engine operating conditions. The throttle position sensor is installed at the rear end of the throttle shaft and uses a Hall linear sensor. After being processed by the sensor signal conditioning board, the LIN sub-node measurement module detects Soqiang. When the throttle is fully closed, the sensor output voltage is equal to 0V; when the throttle is fully open, the output voltage is equal to 5V. When the throttle valve is not disconnected, its output voltage increases linearly. Engine speed, vehicle speed sensor: using Hall pulse type. After being processed by the pulse shaping circuit of the sensor signal conditioning board, the pulse is captured by the input capture port of the main chip. Corresponding to the range of engine speed 1500rpm-8000rpm, the output of the interface board corresponds to the change of 0V-5V. Corresponding to the speed range of 60KM / h-180KM / h, the output of the interface board corresponds to the change of 0V-5V. Intelligent control (fuzzy controller) design The object of vehicle driving state (fatigue driving) monitoring is a fairly complex system control problem, which belongs to the category of multi-input-multi-output fuzzy control systems. People's driving habits, different road conditions, and different driving time periods are reflected in the control of the vehicle, which will produce quite different driving states of the car. Various manipulations of the vehicle, as inputs, are expressed as throttle (throttle) opening, position of the brake pedal, engine speed, vehicle speed, speed change (ie acceleration), steering wheel steering angle and angular acceleration, etc. . The vibration generated by the vehicle under different road conditions as an input will also affect the measurement of the sensor, especially the acceleration sensor. The vibration signal is measured by the LIN sub-node measurement module according to the "average vibration signal strength" in the signal preprocessing program Weaken or eliminate. The output is expressed in terms of the pros and cons of the driving state of the vehicle, and is divided into three levels: "good", "medium", and "poor". When designing the control rule base, the multi-input-multi-output fuzzy control is structured as a multi-input-single output fuzzy control structure, and then designed according to the method of the single-input-single output fuzzy control system to realize the fuzzy decoupling of the multi-variable control system . The experimental data shows that the fatigue driving stage is reflected in the driving state of the car, which is manifested by changes in the acceleration signal of the throttle (throttle) opening, brake pedal and steering wheel steering. The value and frequency are significantly different. This subject uses FreeScale's Low-G series biaxial acceleration sensor MMA6260Q, which can accurately and real-time collect the required acceleration signal as an important parameter of the input variable of the fuzzy controller. Early research on fatigue driving in this research project mainly measured the parameters such as accelerator opening, brake pedal position, engine speed, and vehicle speed. These parameters indirectly and lagfully reflect the changes in driving state. These parameters can be used as fuzzy controllers. Under the limiting conditions of various driving states, combined with the measurement of acceleration, fuzzy control rules are established. Three sets of fuzzy controller models are established corresponding to the three types of variables of accelerator opening, brake pedal position and steering wheel steering axis. The following uses accelerator opening as a variable to illustrate the design of the fuzzy controller. 1. Pasting process: Let the inputs of the fuzzy control of the accelerator opening be the accelerator opening s, the engine speed n, the vehicle speed v, and the accelerator opening acceleration a. The acceleration is divided into five levels of "negative large NB", "negative small NS", "zero ZE", "positive small PS", and "positive large PB" (that is, five fuzzy subsets). The output of the controller is the pros and cons of the driving state of the vehicle (indicated by H), and is divided into three levels: "good GOOD", "medium MIDDLE", and "poor BAD". In order to achieve ambiguity, the membership function of the fuzzy subset of accelerator opening acceleration a is determined as shown in figure (4) below. In order to carry out fuzzy inference according to certain language rules, the membership function that determines the output, that is, reflects the pros and cons of the driving state, is shown in the following figure (5). Figure (4) Acceleration a membership function graph (5) Driving state membership function graph 2. Establishment of fuzzy control rules: Corresponding to the establishment of the accelerator opening fuzzy control rule base, it has interactivity and correlation with the values ​​of the accelerator opening s, engine speed n and vehicle speed v in different numerical ranges. The establishment of the rule base needs to continuously collect data during the operation of the program, through self-learning determination method and self-adjustment of fuzzy rules, and constantly amend and improve in the experiment process. The fuzzy control rules focus on the working process of "poor" and "medium" that affect the driving state of the vehicle. Among them, the rule of "poor" driving state corresponds to the throttle opening s divided into ten segments of 0, 1, 2-9, the engine speed n is divided into ten segments of 1000rpn, 1500rpn-5500rpm, the vehicle speed v is divided into 60km / h, There are ten sections of 70km / h-150km / h, and the acceleration is divided into five levels of "negative large NB", "negative small NS", "zero ZE", "positive small PS" and "positive large PB", which can be summarized as effective Control rules 86 rules. Fuzzy control rule (L) formula: if (IF) throttle opening s is x segment [and (AND)] V [or (OR)] engine speed n is y segment [and (AND)] V [or (OR) ] The vehicle speed v is the z-segment, and the acceleration is level m, then (THEN) driving state is "S". 3. Accurate calculation: Corresponding to the results obtained by the above reasoning method, combined with the database analysis established by the data collected during normal driving of the vehicle, the frequency of the acceleration level is accurately calculated according to the membership function of the output fuzzy subset to determine the optimal driving status of the vehicle Inferior "poor" and "medium", operation prompts and alarms are provided by the interactive interface. Software description 1. Database establishment: The establishment of the driving state fuzzy controller database and data update are important parts of the design of this subject. All rights reserved by SOOQ.cn. When the car is driving normally, the system sets the first two hours of continuous driving as normal driving, and monitors during this time The instrument's job is to collect data on the driver's driving habits, linearize and quantify the data according to the set quantization level, which corresponds to different dimensions of three types of variables such as accelerator opening, brake pedal position, and steering wheel steering axis. The data is processed according to the scale factor, and the data is blurred according to the membership function of the fuzzy subset. In order to eliminate large errors, an interpolation operation is used between the quantization levels, and a weight factor w (.) Is introduced. For any one continuous measurement value, the value of the ambiguity is obtained by two adjacent discrete weighting operations. On the basis of establishing a database with fuzzy data, a mathematical model of normal driving habits is generated and corrected based on the continuously collected data. As the continuous driving time increases (greater than two hours or the change of the collected data exceeds the driving state monitoring index), the monitor automatically enters the fatigue driving monitoring state. 2. Software block diagram (1). PC programming: The PC program is written in C language to complete the establishment and maintenance of the database, the management of the LIN-BUS network, the calculation of fuzzy controller algorithms and rules, and the input and output control of the interactive interface. The software block diagram is shown in Figure (6). Figure (6) PC software block diagram (2). Program design of measurement module: The measurement module is a data collector with MM908E625 single chip as the core. The program is designed with CodeWarrior3.1CW-HC083.0. The software block diagram of the measurement module is shown in Figure (7). Figure (7) Software block diagram of the measurement module in conclusion The application of intelligent control technology to the subject of automobile fatigue driving monitoring is a quite complex and difficult research direction. Through the research of LIN-BUS network, the MM908E625, Low-G acceleration sensor and other sensors have been established with embedded PCs. A hardware platform to realize the establishment of a database for normal driving, short distance driving, and short time driving of the driving status of the car, the modification of the data in the rule base, and the monitoring of the fatigue driving status. The three main factors that affect the driving state, such as the accelerator opening, the position of the brake pedal and the steering wheel steering axis, are designed. A fuzzy controller is designed, and it is usefully discussed in terms of theory and hardware implementation, although it is far from practical application and industrialization. A certain distance, but laid a good foundation for further improving the design of the system. Ribbon Connector,Ribbon Connectors,Flat Ribbon Cable Connectors,Ribbon Cable Connectors YUEQING WEIMAI ELECTRONICS CO.,LTD , https://www.weimaicarconn.com