105.6V eVtol Battery,105.6V Battery Pack,105.6V Battery,105.6 Volt Battery Shenzhen Jentc Technology Co., LTD , https://www.phenyee.com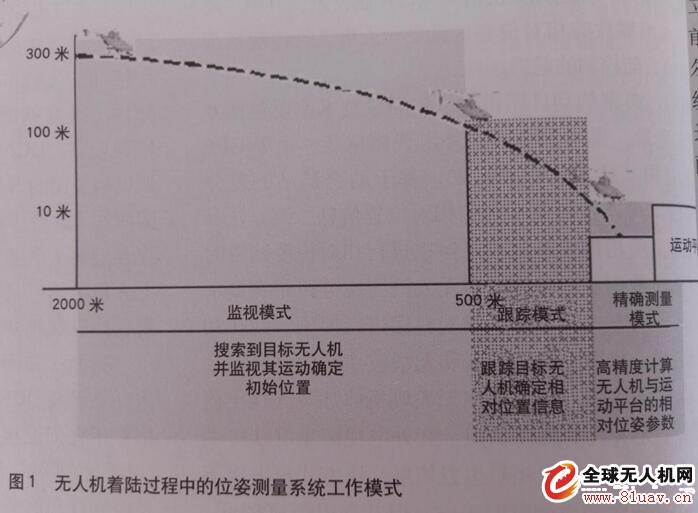
The landing process of the drone is similar to that of a manned helicopter. When the drone enters the landing control area, it is guided by the navigation system to the capture point behind the landing deck and then hovered for waiting. When the unmanned helicopter receives the motion platform The ideal descent trajectory and landing command are sent to land, and the typical UAV landing process includes four phases: steady descent, hover follow-up, lateral movement and descent landing. According to the different requirements of the relative position and position information of the unmanned helicopter and the motion platform during the landing process, the landing guidance system of the ship-borne unmanned helicopter is divided into three working modes: monitoring mode, tracking mode and accurate measurement mode, as shown in the figure. 1 is shown.
The drone needs to switch the navigation mode of the aircraft during the hovering waiting phase. This stage is the monitoring mode. The relative pose measurement system acquires the position of the drone through the UAV measurement and control link, and searches for the target in the target drone area. The human machine monitors its motion, and the target drone is determined by the target detection technique to provide initial position information for the tracking mode of the next stage. In the process of steady decline, when the longitudinal relative position of the drone and the motion platform is about 500 meters, the working mountain monitoring mode of the relative pose measurement system is switched to the tracking mode, and the target drone is realized by the optical target tracking technology. Real-time tracking, in this stage, the relative attitude of the drone and the ship has little effect on the landing safety of the drone, so it is only required to solve the relative position and motion parameters of the target drone and the ship. When the longitudinal position of the drone and the motion platform is 10 meters, the operation of the relative pose measurement system is switched from the tracking mode to the accurate measurement mode. In this stage, the relative position and parameters of the drone and the carrier are accurately measured in real time. The key to automatic landing.