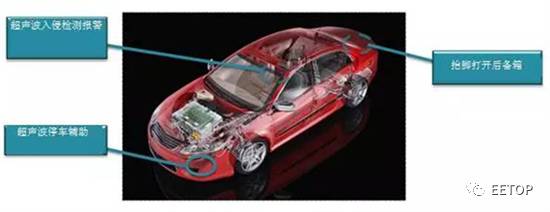
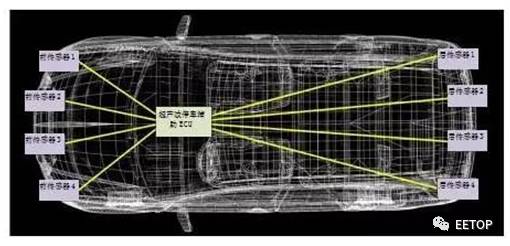
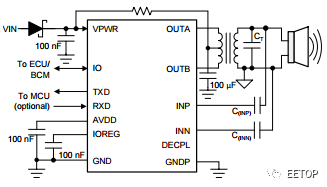
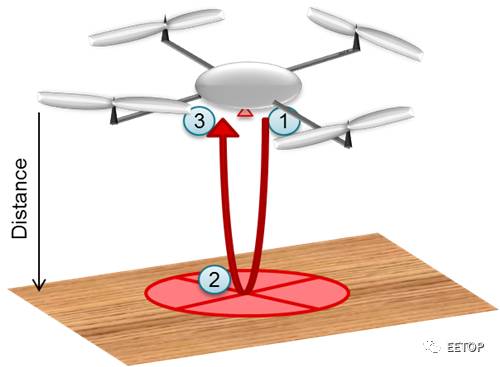
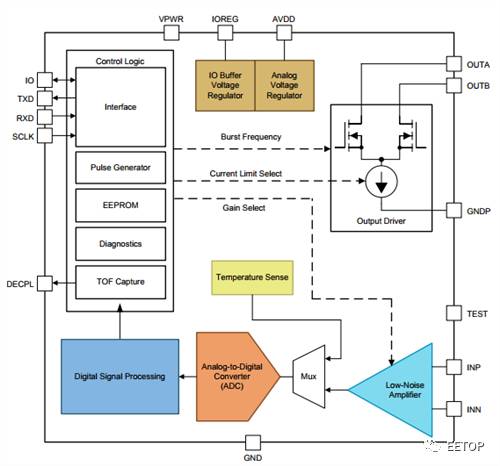
Ultrasonic principle Ultrasound is defined as the use of sound waves above the upper limit of human hearing – see Figure 1. Figure 1: Ultrasound range Ultrasonic waves can pass through various media (gas, liquid, solid) to detect objects with acoustic impedance mismatch. The speed of sound is the distance per unit time when sound waves travel in an elastic medium. For example, in dry air at 20 ° C (68 ° F), the speed of sound is 343 meters per second (1,125 feet per second). Ultrasonic attenuation in air increases with increasing frequency and humidity. Therefore, air-coupled ultrasonic waves are typically limited to frequencies below 500 kHz due to excessive path loss/absorption. Part 1: For automotive applications For many years, ultrasonic sensors have been widely used in passenger vehicles such as ultrasonic parking assistance to help vehicles detect surrounding objects at low speeds. In addition, kicking the trunk and intrusion detection alarms are two emerging applications for ultrasonic sensors. As shown in Figure 1. This article will explain in detail why and how these three applications use ultrasonic sensors. Figure 1: Ultrasonic sensor for passenger cars Ultrasonic parking assist system Ultrasonic parking assistance is also known as parking assist systems, parking guidance systems, and reverse assist. These systems enable automatic parking from simple detection of surrounding objects and alerting the driver by sound to virtually no human intervention. Typically, these systems have 4-16 sensors that are cleverly mounted around the body to provide the required inspection coverage, as shown in Figure 2. Figure 2: Ultrasonic Parking Assist Star Configuration with PGA460-Q1 Engineers designing these types of applications should seek integrated circuits that drive ultrasonic sensors (transmitters) while receiving, conditioning, and processing ultrasonic echoes that determine the distance between the object and the vehicle. For example, the PGA460-Q1 is capable of reliably detecting International Standards Organization (ISO) rods up to 5 meters in distance (for polyvinyl chloride (PVC) tubes for ultrasonic parking assistance as a performance standard). The device also passed stringent electrostatic discharge (ESD) and high current injection (BCI) tests, which are routine tests performed during the development of ultrasonic parking assist systems. As original equipment manufacturers (OEMs) face the need to increase the number of ultrasonic sensors per vehicle, the cost pressure of ultrasonic parking assistance will continue to increase in the coming years. The PGA460-Q1 is able to provide a competitive cost structure for high-volume Tier 1 suppliers. Common requirements for ultrasonic parking assist modules include: ?? The ability to detect objects from 30 cm to 5 m. • Time Command Interface (TCI) or Local Interconnect Network (LIN) communication from the module to the local electronic control unit or directly to the Body Control Module (BCM) (bus configuration). To meet the needs of self-driving cars, short- and long-distance object detection standards will become more stringent. Starting in 2025, the ultrasound module will have to be able to detect objects from 10 cm to 7 m. Improvements in analog front end (AFE) sensitivity and drive methods by semiconductor suppliers are critical to meeting these detection distance requirements. TCI and LIN are the two most common communication interfaces in today's ultrasonic parking assistance systems. However, with the improved visual processing capabilities of the Automotive Advanced Driver Assistance System (ADAS), higher speed protocols such as Peripheral Sensor Interface (PSI) 5, Distributed System Interface (DSI) 3 or Controller Area Network (CAN) are expected to be applied. To transmit a large amount of ultrasonic echo data. Kicking the open trunk The kicker opening trunk is also known as the smart trunk opening system. This feature allows the owner to place his foot under the rear bumper without having to use both hands, just kicking the foot to open the trunk of the car, as shown in Figure 3. Figure 3: The kicker opens the trunk The traditional kick-open trunk system uses a capacitive sensor strip at the bottom of the bumper. But many automotive Tier 1 suppliers are exploring the use of ultrasonic sensing technology in this application, and some systems have been mass produced. Compared with capacitive sensing, the advantage of ultrasonic sensing is the reliability and robustness under the influence of environmental factors such as dirt and water. Capacitive sensing is very sensitive to environmental factors. If the body is dirty, this function may not work properly. . Common requirements for ultrasonic solutions for kick-open systems include: Ability to detect objects from 15 cm to 1 m Low quiescent current Working properly with 12V car battery Let us introduce these requirements one by one. Object detection from 15 cm to 1 m One of the challenges of using ultrasonic sensing technology to kick the foot to open the trunk is the close range detection range. The ability of an ultrasonic sensor to accurately detect near-field objects depends on the quality of the sensor and the sensor's specifications, drive method and design, and the performance of the receive path (AFE and digital processing). High-quality sensors, such as Murata's MA58MF14-7N, have more stable and reliable attenuation or "ringing" during the sensor excitation phase. By choosing a high-quality sensor, you can reduce the length of the decay time and more accurately predict the stability of the attenuation. The method and design of the sensor driver will significantly affect the ultrasonic attenuation period and curve. In kick-off open trunk applications where near-field performance is required, TI recommends using a transformer-driven topology. Figure 4 is an example of a transformer drive schematic using PGA460-Q1. Figure 4: PGA460-Q1 transformer drive schematic When the transformer is used to increase the power supply voltage to activate the sensor, the attenuation curve is more stable and measurable, which makes the close-range object detection performance better. Finally, the performance of AFE and digital processing can also affect object detection at close and long distances. For example, the PGA460-Q1 features a low noise amplifier with a programmable time-varying gain stage embedded in a 12-bit successive approximation register analog-to-digital converter. Low-noise amplifiers reduce the noise of the received signal, and the time-varying gain characteristics of the programmable gain amplifier allow for smaller gains for near-field objects and larger gains for far-field object detection. You can store the gain curve settings in the registers in an electrically erasable programmable read only memory (EEPROM). Low quiescent current Since the kicker opening ultrasonic sensor must be operated with the car turned off, the system quiescent current is very important and is an OEM's concern. The PGA460-Q1 has a sleep mode of ~500μA current consumption, which can be used intermittently to achieve the necessary level of current consumption throughout the system. Working properly with 12V car battery The PGA460-Q1 device is designed to operate from an input voltage range of 6V to 28V. In a kick-open trunk application, the PGA460-Q1 device is directly connected to the car battery. Proper external component protection, such as transient voltage suppression (TVS) diodes, helps protect the device from battery transients and reverse battery currents. Intrusion detection alarm In Europe, intrusion detection alarms are optional equipment for consumers when they purchase a car or after installing a car. When the car is turned off and docked, these alarms will use an ultrasonic sensor to detect any movement inside the car. This alarm is used as a backup system for the main alarm system and will also give an alarm if the child or pet moves inside the vehicle. Depending on the added security and security, consumers often get insurance discounts because their vehicles have this feature. Most systems use one or two ultrasonic transmitters and one or two receivers. Ultrasonic sensors such as the PGA460-Q1 can drive and receive one transmitter and one receiver, so one or two PGA460-Q1 devices may be required. to sum up Although these three applications are most commonly used with ultrasonic sensors, Tier 1 suppliers and original equipment manufacturers are developing additional applications such as gull-wing doors, blind spot detection systems, and forward active collision avoidance systems. Do you also know about other automotive applications that use ultrasonic sensors? Please comment below. Part II: For UAV Applications In recent years, consumer drones have become increasingly popular for shooting stunning footage, transporting relief supplies, and even for competition. Most drones use a variety of sensing technologies for autonomous navigation, collision detection, and many other features. Ultrasonic sensing is especially helpful for drone landing, hovering and ground tracking. The drone landing aid is a function of the drone that can detect the distance between the bottom of the drone and the landing area, determine whether the landing point is safe, and then slowly descend to the landing area. Although GPS monitoring, barometric sensing and other sensing technologies contribute to the landing process, in this process, ultrasonic sensing is the primary and most accurate basis for UAVs. Most drones also have hover and ground tracking modes that are primarily used to capture footage and land navigation, where ultrasonic sensors help keep the drone at a constant height above the ground. Part 1 discusses how to combine ultrasonic sensors with automotive applications. Next, we will explore the reasons why ultrasonic sensing can be used in drone applications. Ultrasonic ToF As with many ultrasonic sensing applications, the UAV Landing Assist uses the Time of Flight (ToF) principle. ToF is an estimate of the round trip time of the ultrasonic wave emitted from the sensor to the target object and then reflected back from the object back to the sensor, as shown in Figure 2. Figure 2: Ultrasonic ToF schematic for drone landing At point 1 in Figures 2 and 3, the ultrasonic sensor of the drone emits sound waves, which are represented as saturated data on the return signal processing path. After transmission, the signal processing path becomes muted (point 2) until the echo is reflected back from the object (point 3). Figure 3: Phase of the ultrasonic ToF Equation 1 calculates the distance from the drone to the ground or from the drone to another object: The distance (d) is the distance from the ultrasonic sensor on the drone to the ground/object, ToF(t) is the ToF defined earlier, and SpeedOfSound(v) is the speed of sound through the medium. ToF(t)×SpeedOfSound(v) is divided by 2 because ToF calculates the time for the ultrasonic echo to and from the object. Why use ultrasonic induction for drone landing? While numerous sensing technologies can detect the proximity of objects, ultrasonic sensing works well in terms of detection distance, solution cost, and reliability of different surfaces when the drone is landing. The common requirement for drone ground tracking and landing is the ability to reliably detect distances 5 meters above the ground. Assuming that the signal is adjusted and processed correctly, ultrasonic sensors in the 40-60 kHz range can usually meet this range. Texas Instruments' PGA460 is an ultrasonic signal processor and sensor driver for ultrasonic sensing in air-coupled applications such as drones that can meet or exceed 5 meters. However, the coordination of ultrasonic sensing is a limitation in the near field detection of objects. All ultrasonic sensors used in air-coupled applications have an excitation period called decay time or oscillation time, during which the piezoelectric film vibrates and emits ultrasonic energy, making it difficult to detect any incoming echo. To effectively measure objects during ringing, many drone designers install separate sensors for the transmitter and receiver. By separating the receiver, the drone can detect the object during excitation of the transmitter. The PGA 460 therefore has superior near field detection performance – as low as 5 cm or less. Ultrasonic sensing technology is also a cost-competitive technology, especially when using integrated solutions such as the PGA460, which includes most of the required chips. The PGA460 can either drive the sensor directly using a half-bridge or H-bridge or use a transformer to drive the sensor; the latter is primarily used for sealed "closed" sensors. The PGA 460 also includes a complete analog front end for receiving and adjusting ultrasonic echoes. In addition, the device can also calculate ToF by digital signal processing (see Figure 4). Figure 4: Functional Block Diagram of PGA460 Finally, ultrasonic sensing can detect surfaces that are difficult to solve with other technologies. For example, drones often encounter glazing and other glass surfaces on buildings. Light sensing technology sometimes passes through glass and other transparent materials, which makes it difficult for drones to hover over glass buildings. Ultrasonic waves can reliably reflect the glass surface. Although ultrasonic sensing is primarily used for drone-assisted and hovering, its powerful price/performance ratio is driving drone designers to explore other applications of the technology. The rapidly growing field of drones has great potential. Led Wall Display,Outdoor Advertising Sign Banner,Advertising Digital Signs Banner,Outdoor Signs Banner APIO ELECTRONIC CO.,LTD , https://www.displayapio.com