The frequency converter is a device that converts a commercial power supply (50 Hz or 60 Hz) into an AC power supply of various frequencies to realize variable speed operation of the motor, wherein the control circuit completes control of the main circuit, and the rectifier circuit converts the alternating current into direct current, and the middle of the direct current The circuit smoothes the output of the rectifier circuit, and the inverter circuit reverses the direct current into alternating current. For a frequency converter such as a vector control inverter that requires a large amount of calculations, sometimes a CPU for torque calculation and some corresponding circuits are required. The frequency conversion speed regulation achieves the purpose of speed regulation by changing the frequency of the power supply of the stator winding of the motor. Inverter wiring diagram: Gear Sensor has been widely used in the automotive and industrial field, which is important to the measurement of velocity, angel, angular velocity, direction of rotation. Gear Sensor,Custom Gear Sensor,Gear Sensor 3 Pins,Good Gear Sensor Yuheng Optics Co., Ltd.(Changchun) , https://www.yhenoptics.com
There are various classification methods of frequency converters. According to the main circuit working mode, they can be divided into voltage type inverters and current type inverters. According to the switch mode classification, they can be divided into PAM control inverters, PWM control inverters and high carrier frequencies. PWM control inverter; according to the working principle, it can be divided into V/f control inverter, slip frequency control inverter and vector control inverter; according to the purpose classification, it can be divided into general inverter, high performance special inverter, High frequency inverter, single phase inverter and three phase inverter.
VVVF: Change voltage, change frequency CVCF: constant voltage, constant frequency. The AC power supply used in various countries, whether for home or factory, has a voltage and frequency of 400V/50Hz or 200V/60Hz (50Hz), and so on. Generally, a device that converts an alternating current having a constant voltage and frequency into an alternating current of a variable voltage or frequency is called a "frequency converter". In order to generate a variable voltage and frequency, the device first converts the alternating current of the power source to direct current (DC).
A frequency converter for motor control that changes both voltage and frequency.
The working principle of the inverter We know that the synchronous motor speed expression of the AC motor is:
n=60 f(1-s)/p (1)
In the middle
n———the speed of the asynchronous motor;
F———the frequency of the asynchronous motor;
s———motor slip rate;
p———The number of poles of the motor.
It can be seen from equation (1) that the rotational speed n is proportional to the frequency f, and the rotational speed of the motor can be changed by changing the frequency f. When the frequency f is varied within the range of 0 to 50 Hz, the motor rotational speed adjustment range is very wide. The frequency converter achieves speed adjustment by changing the frequency of the motor power supply, and is an ideal high-efficiency, high-performance speed control means. 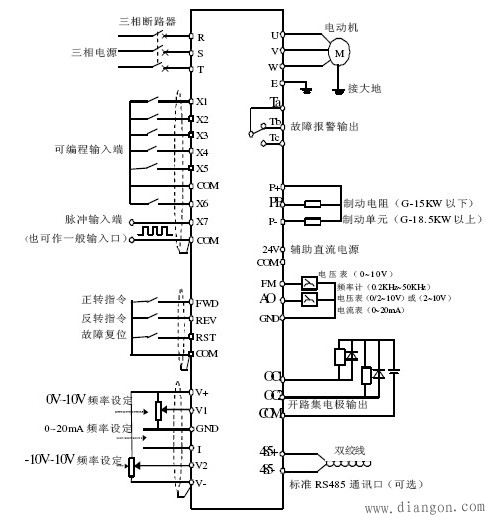
Inverter control mode Low-voltage universal variable frequency output voltage is 380 ~ 650V, output power is 0.75 ~ 400kW, working frequency is 0 ~ 400Hz, its main circuit uses AC-DC-AC circuit. The way it is controlled has gone through the following four generations.
The 1U/f=C sinusoidal pulse width modulation (SPWM) control method is characterized in that the control circuit has a simple structure, low cost, good mechanical property hardness, and can meet the requirements of smooth speed regulation of general transmission, and has been in various fields of the industry. Widely used. However, in this mode of control, at low frequencies, the torque is affected by the voltage drop of the stator resistance due to the lower output voltage, which reduces the maximum output torque. In addition, its mechanical characteristics do not have DC motor hard, dynamic torque capability and static speed regulation performance are not satisfactory, and the system performance is not high, the control curve will change with the load change, the torque response is slow, the motor turns The moment utilization rate is not high, and the performance is degraded due to the existence of the stator resistance and the dead zone effect of the inverter at a low speed, and the stability is deteriorated. Therefore, people have also studied vector control frequency control.
The voltage space vector (SVPWM) control mode is based on the premise of the three-phase waveform overall generation effect, and aims to approximate the ideal circular rotating magnetic field trajectory of the motor air gap, generating a three-phase modulation waveform at a time, and adopting an inscribed polygon approaching the circle. controlling. After practice, it has been improved, that is, the introduction of frequency compensation can eliminate the error of speed control; estimate the magnitude of the flux linkage through feedback to eliminate the influence of stator resistance at low speed; close the output voltage and current to improve the dynamic accuracy and stability. However, there are many control circuit links and no torque adjustment is introduced, so the system performance has not been fundamentally improved.
Vector control (VC) mode vector control The principle of variable frequency speed regulation is to make the stator currents Ia, Ib, Ic of the asynchronous motor in the three-phase coordinate system pass the three-phase-two-phase transformation, which is equivalent to the two-phase stationary coordinate system. The alternating current Ia1Ib1 is equivalent to the direct current Im1, It1 in the synchronous rotating coordinate system by the rotational transformation of the rotor field, which is equivalent to the excitation current of the direct current motor; It1 is equivalent to the armature current proportional to the torque. Then, imitating the control method of the DC motor, obtaining the control amount of the DC motor, and implementing the control of the asynchronous motor through the inverse transformation of the corresponding coordinates. The essence is that the AC motor is equivalent to a DC motor, and the two components of speed and magnetic field are independently controlled. By controlling the rotor flux linkage and then decomposing the stator current to obtain two components of torque and magnetic field, coordinate transformation is used to realize orthogonal or decoupling control. The proposed vector control method has epoch-making significance. However, in practical applications, because the rotor flux linkage is difficult to accurately observe, the system characteristics are greatly affected by the motor parameters, and the vector rotation transformation used in the equivalent DC motor control process is complicated, making the actual control effect difficult to achieve the ideal analysis. result.
Direct Torque Control (DTC) mode
In 1985, Professor DePenbrock of Ruhr University in Germany first proposed the direct torque control frequency conversion technology. This technology largely solves the above-mentioned shortcomings of vector control, and has been rapidly developed with novel control ideas, simple and clear system structure, and excellent dynamic and static performance. At present, this technology has been successfully applied to high-power AC drives for electric locomotive traction. The direct torque control directly analyzes the mathematical model of the AC motor in the stator coordinate system to control the flux linkage and torque of the motor. It does not require the AC motor to be equivalent to a DC motor, thus eliminating many of the complex calculations in vector rotation transformation; it does not require the control of a DC motor, nor does it need to simplify the mathematical model of the AC motor for decoupling.
Matrix type intersection-crossing control method
VVVF frequency conversion, vector control frequency conversion, direct torque control frequency conversion are all one of AC-DC-AC frequency conversion. The common disadvantage is that the input power factor is low, the harmonic current is large, the DC circuit needs a large storage capacitor, and the regenerative energy cannot be fed back to the grid, that is, the four-quadrant operation cannot be performed. To this end, matrix-type AC-AC frequency conversion came into being. Since the matrix type AC-AC frequency conversion eliminates the intermediate DC link, the bulky and expensive electrolytic capacitor is omitted. It can achieve a power factor of l, the input current is sinusoidal and can operate in four quadrants, and the system has a high power density. Although the technology is not yet mature, it still attracts many scholars to study in depth. The essence is not to indirectly control the current, flux linkage, etc., but to achieve the torque directly as the controlled amount. The specific method is:
——Control the stator flux linkage into the stator flux linkage observer to realize the speed sensorless method;
——Automatic identification (ID) relies on accurate motor mathematical model to automatically identify motor parameters;
—— Calculate the actual value corresponding to the stator impedance, mutual inductance, magnetic saturation factor, inertia, etc. to calculate the actual torque, stator flux and rotor speed for real-time control;
——Band-Band control The Band-Band control of flux linkage and torque generates PWM signals to control the inverter switching state.
Matrix AC-AC has fast torque response (<2ms), high speed accuracy (±2%, no PG feedback), high torque accuracy (<+3%), and high start-up Moment and high torque accuracy, especially at low speeds (including 0 speed), can output 150% to 200% torque.